Automatización del tracking de satélites en rotores analógicos con Arduino
Este año, desde el Radioclub EIT, tenemos como proyecto general indagar un poco en las comunicaciones vía satélite. Un buen punto de partida para ello es la recepción de satélites tanto destinados a comunicaciones entre radioaficionados como a suministrar información de caracter meteorológico o incluso la misma ISS (Estación Espacial Internacional).
Todos estos sistemas satelitales tienen un elemento en común: describen órbitas LEO (Low Earth Orbit, entre 400Km y 800Km de altitud). Es por ello que, para recibir la señal que emiten, se vuelve imprescindible el uso de un sistema de seguimiento, para asegurar un buen apuntamiento de la antena y que así la zona de mayor ganancia de ésta esté siempre enfocada hacia el punto en el cielo donde se encuentra el satélite emitiendo.
Actualmente disponemos en el club de una estación destinada a la recepción de este tipo de satélites. El problema que presenta es que, debido a su antigüedad, el tracking de los satélites debe realizarse manualmente (accionando a mano unas palancas para controlar el movimiento del rotor). Nuestro objetivo es, por tanto, ser capaces de automatizar este seguimiento, mediante una interfaz rotor-PC, para que el rotor se pueda orientar de forma autónoma según los datos suministrados por un programa especializado como pueda ser GPredict u Orbitron.
Hardware
El hardware necesario para realizar el montaje será:
- Arduino UNO R3
- Módulo cuádruple de Relés
- Conector DIN de 8 pines
Nuestras controladoras de rotores, al igual que la mayoría de controladoras con más de 10/15 años, presentan en su parte trasera un conector DIN hembra de 8 pines. Este pin ofrece la posibilidad tanto de controlar el rotor de forma externa como de leer información acerca de en qué dirección se encuentra apuntando la antena en ese instante:
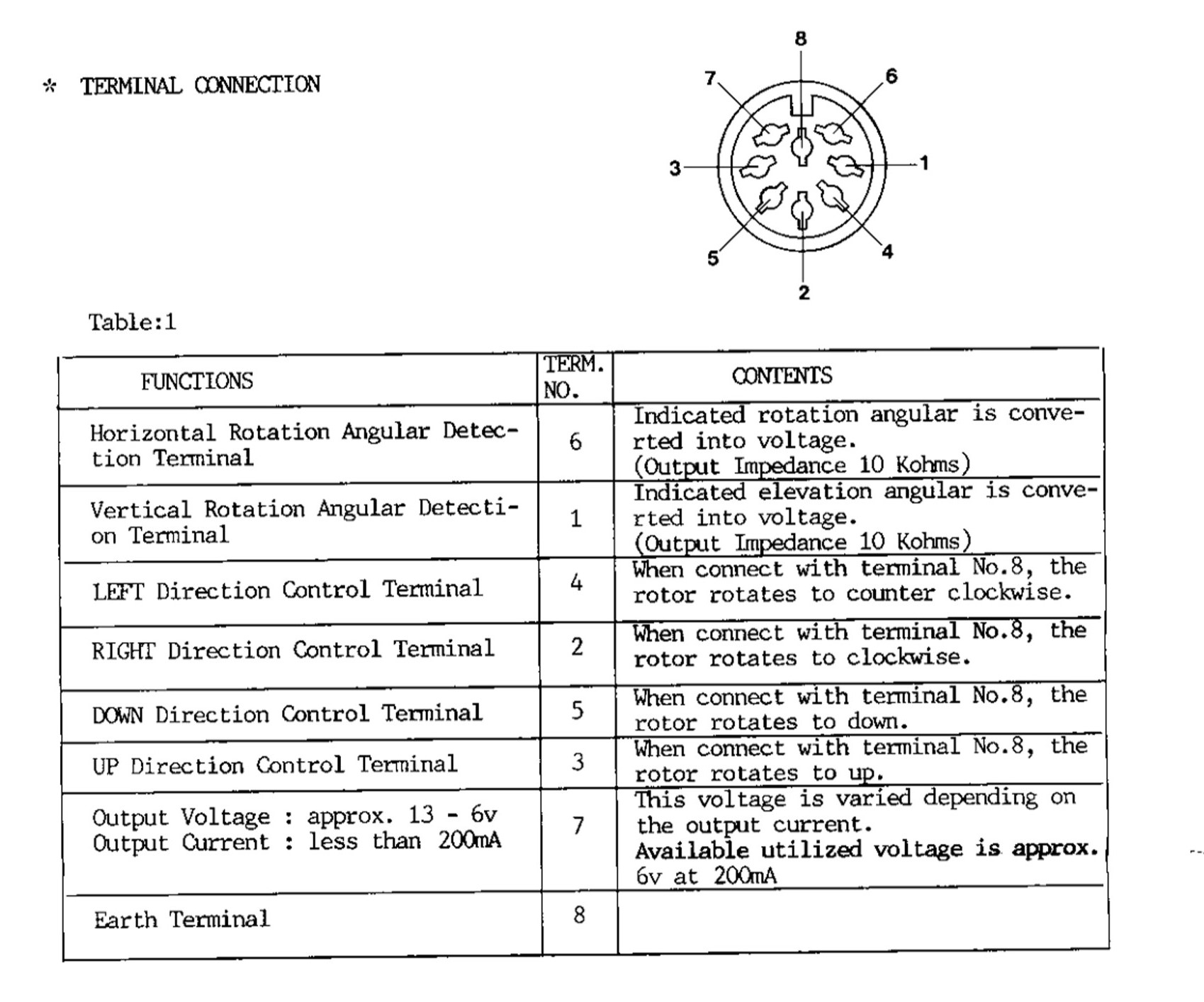
Mediante un arduino, leeremos los datos analógicos de los pines 6 y 1 (apuntamiento en los ejes de elevación y acimut), y, mediante la placa de relés, controlaremos el movimiento del rotor. Esto se puede programar de forma muy sencilla mediante las funciones analogRead() y digitalWrite().
Software
La verdadera complejidad del proyecto consiste en la comunicación entre el software de tracking de satélites (GPredict en nuestro caso) y el arduino en sí.
Para facilitar la comunicación entre ambos, usaremos una librería llamada Hamlib, la cual permite obtener los datos relativos a la posición del satélite en tiempo real y enviar dicha información a través de un puerto serie (nuestro programa debe encargarse de calcular cuánto debe rotarse la antena y en qué dirección a partir de estos datos). Como GPredict incluye soporte nativo para esta librería a través de puertos TCP, nos debemos ocupar del protocolo de conexión Hamlib-Arduino.
Hamlib es compatible con una variedad muy amplia de protocolos usados por rotores modernos de diferentes marcas:
Rig # Mfg Model Version Status
1 Hamlib Dummy 0.2 Beta
2 Hamlib NET rotctl 0.3 Beta
201 Hamlib EasycommI 0.4 Beta
202 Hamlib EasycommII 0.4 Beta
204 Hamlib EasycommIII 0.4 Alpha
301 XQ2FOD Fodtrack 0.2 Stable
401 Idiom Press Rotor-EZ 2010-02-14 Beta
402 Idiom Press RotorCard 2010-02-14 Untested
403 Hy-Gain DCU-1/DCU-1X 2010-08-23 Untested
404 DF9GR ERC 2010-08-23b Alpha
405 Green Heron RT-21 2014-09-14 Alpha
501 SARtek SARtek-1 0.2 Untested
601 Yaesu GS-232A 0.3 Beta
602 Yaesu/Kenpro GS-232 0.1 Beta
603 Yaesu GS-232B 0.2 Beta
604 F1TE GS232/F1TE Tracker 0.1 Beta
701 WA6UFQ PcRotor 0.1 Untested
801 Heathkit HD 1780 Intellirotor 0.1 Beta
901 SPID Rot2Prog 1.0 Stable
902 SPID Rot1Prog 1.0 Stable
1001 M2 RC2800 0.1.1 Beta
1101 EA4TX ARS RCI AZ&EL 0.1 Beta
1102 EA4TX ARS RCI AZ 0.1 Beta
1201 AMSAT IF-100 0.1 Untested
1301 LA7LKA ts7400 0.1 Beta
1401 Celestron NexStar 0.1 Untested
1501 DG9OAA Ether6 (via ethernet) 0.1 Beta
1601 CNCTRK CNCTRK 0.1 Untested
En nuestro caso, optamos por utilizar el protocolo Easycomm II. La lista completa de comandos que componen este protocolo es la siguiente:
Command Meaning Perameters
------- ------- ----------
AZ Azimuth number - 1 decimal place [deg]
EL Elevation number - 1 decimal place [deg]
UP Uplink freq in Hertz
DN Downlink freq in Hertz
DM Downlink Mode ascii, eg SSB, FM
UM Uplink Mode ascii, eg SSB, FM
DR Downlink Radio number
UR Uplink Radio number
ML Move Left
MR Move Right
MU Move Up
MD Move Down
SA Stop azimuth moving
SE Stop elevation moving
AO AOS
LO LOS
OP Set output number
IP Read an input number
AN Read analogue input number
ST Set time YY:MM:DD:HH:MM:SS
VE Request Version
Ya que sólo pretendemos controlar un rotor y no una radio también, los únicos comandos a implementar serán AZ, EL. Para ello, nuestro programa contará con un buffer donde se van almacenando los caracteres recibidos por puerto serie, para identificar si alguna de las cadenas de caracteres recibidas se corresponde con AZ o EL y obtener el número enviado inmediatmente después.
Una vez reconocido dicho valor y estando éste almacenado en una variable, se realiza una lectura del peurto analógico para obtener la posición hacia la que se encuentra apuntando la antena en ese instante, se compara con los datos recibidos, y se activan los relés si es necesario (se incluye un pequeño rango de error debido a las fluctuaciones de las medidas del puerto analógico).
Resultado
El código completo puede obtenerse en el siguiente enlace:
https://github.com/WX-Ground-Station-RadioClub-E-I-T/automatedrotortracker
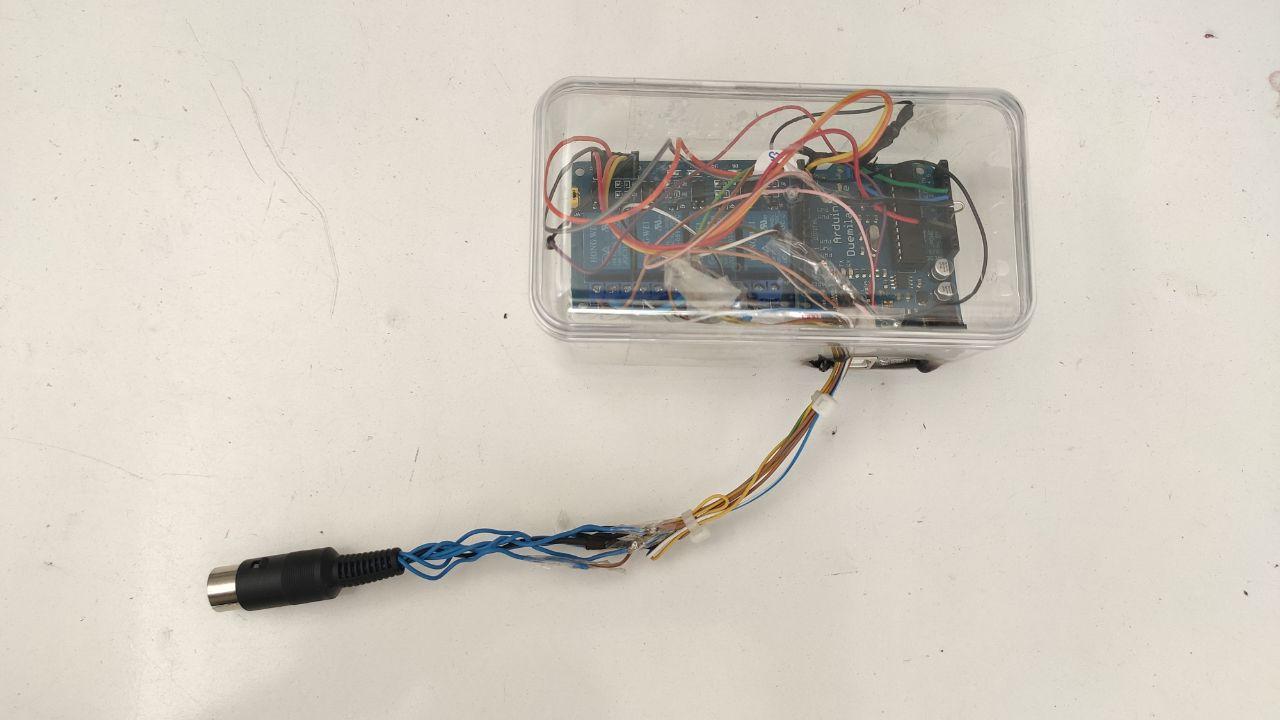
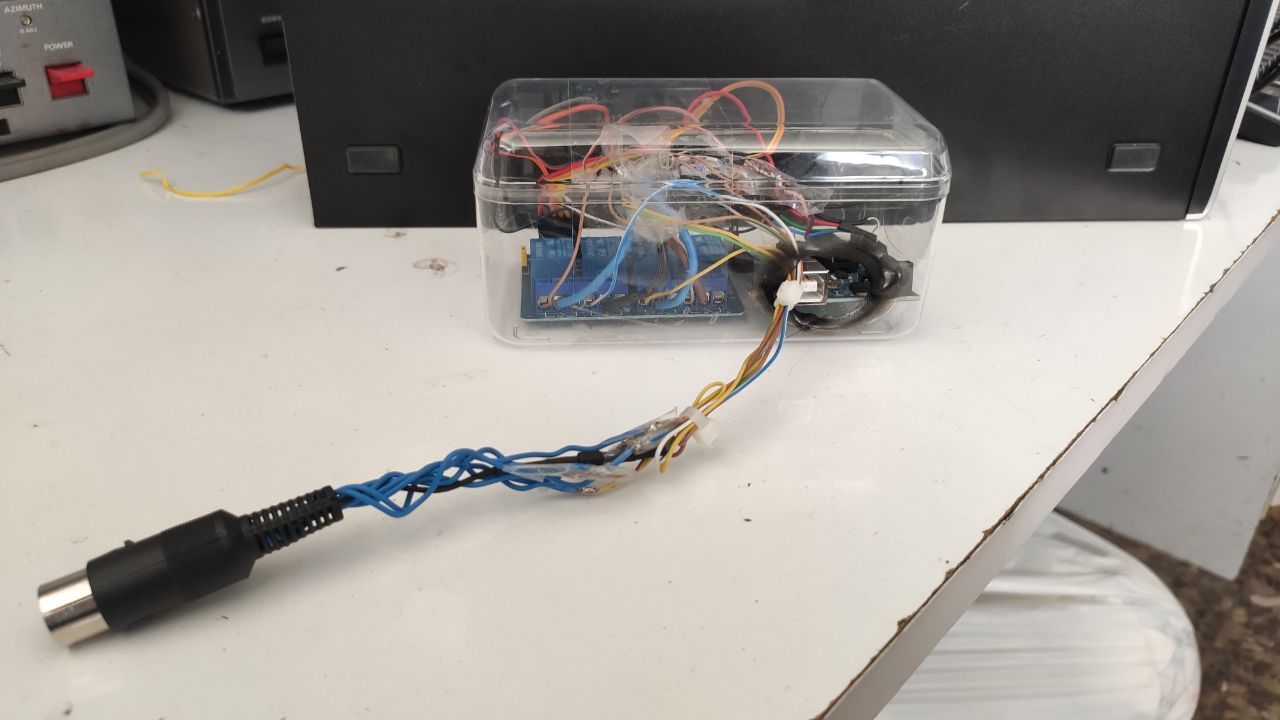
Algunas fotos del sistema funcionando: